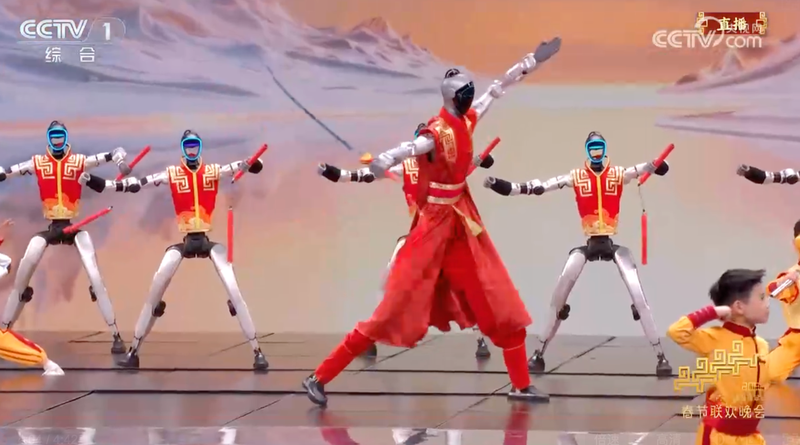
 2026年央视马年春晚,御数科技携G1、H2类人形机器人第三次登上央视舞台,呈现全球首个全自主人形机器人群武术表演《Martial BOT》。从跑酷桌跳到单腿翻筋斗、棍棒格斗、剑术,这场“网络真功夫”不仅让观众着迷,也再次更新了人形机器人的技术极限。新京报贝壳财经记者从玉树科技获悉,从去年11月正式发布,到跨年夜完美呈现,玉树工程师在短短几个月内攻克了一系列全球性技术难题。最终,这款人形机器人突破了运动性能的极限,取得了多项“世界第一”。玉树H2仿人机器人玩剑。央视新闻截图 攻克“难招”:跟头、跑酷,如何操控装备?期间节目中,玉树机器人在全球首次表演了一系列高难度动作,包括一系列引人注目的旋转桌子跑酷、弹射空翻、最大高度超过3米的空翻、连续单腿翻筋斗、两步墙后空翻、巨大的七圈半旋转旋转等。玉树告诉贝壳财经记者,该程序最困难的动作集中在三类,其中包括互动对象。动作(棍术、双截棍、太师剑等)、环境互动动作(跑酷翻桌、踢墙等)、极限地面动作(如空中连续旋转)。例如,考虑环境交互动作(例如 voltea 跑酷桌或踩在墙上)。该类别的主要挑战在于准确估计机器人在高速运动过程中的相对位置并动态调整脚手架。据报道工程师很小心在模拟中考虑了可能出现的姿势偏差,训练机器人在运行过程中实时规划步态,最终实现稳定地穿越和利用桌子、墙壁等障碍物。玉树G1机器人踩墙。央视新闻截图 物体交互动作(棍术、双节棍、太师剑等)需要机器人实时检测设备状态并对干扰做出反应。玉树团队对设备进行了物理建模,并在模拟环境中进行了广泛的强化学习训练。这使得机器人能够学习动态识别和控制相关设备的扭矩。我们广泛测试了地面极端运动(例如空中连续旋转)的软件和硬件性能。通过硬件结构升级、电机性能优化、运动控制算法迭代、多传感器融合定位,玉树fi翻筋斗后终于实现厘米级落点控制。玉树G1机器人武术表演背后的“黑科技”央视新闻截图:从“集群控制”到“全自主协作”:数十个机器人如何协同作战?展会上,数十台机器人进行了复杂的队形变化、快速动作和舞台互动,甚至在激烈的动作后准确返回原来的位置。这一切的背后,离不开玉树自主研发的全新升级的高并发集群控制系统的支持。该系统首先利用机器人自己的 3D 激光雷达实时扫描和定位场景,使每个机器人能够“自我定位”。主控制台实时接收每个机器人的位置。获取信息并提供目标轨迹和行动指令。当机器人收到指令后,调用运动控制算法跟踪目标点,到达t他在指定时间内指定位置,并调用武术运动控制算法来完成一系列动作。数十台玉树机器人将共同登台表演。在央视新闻截图过程中,玉树利用AI融合定位算法,深度融合人体检测数据和3D激光雷达数据,每秒处理数百次环境信息,让机器人在剧烈运动后也能保持准确的位置,避免在翻跟头等高动态运动中丢失位置。更重要的是,系统具有自我监控和自主恢复能力。即使机器人在表演过程中因干扰而发生偏离,它也能完全自主地快速返回到原来的位置,确保整个表演的连续性和一致性。这种高并发、低延迟的集群控制能力是全球首个全自主人形机器人集群的核心三武术表演。从舞台到现实:武术背后的技术基础如何转移到产业? 《Wu BOT》不仅是视觉上的享受,更是于叔技术能力的凝结。这些技术可以转移到现实世界的场景,例如工业和服务业。以多机协调系统为例,支撑整个武术表演的集群自动控制系统,解决了数十台机器人组成复杂队形的实时编程和动作同步问题。该技术可迁移到工业场景中的多机器人协同巡检、仓库分拣、装配线等任务中,实现大规模作业的高效协同。支持的运动和外部干扰处理技术在精密装配、重物搬运、清洁服务等场景中具有广泛的应用价值。机器人的抓取设备时应对外界冲击的能力本质上体现了机器人对外界干扰的自适应控制能力。机器人在跑酷台转弯时对步态和障碍物的动态判断和协调等相对定位和环境交互能力,非常符合货架上堆放物品、穿过狭窄空间、爬楼梯等任务的要求。经过程序验证的技术方案让您即使在跑步时也能快速完成姿势调整。当转移到现实场景中时,机器人的作业效率和环境适应性显着提高。正如于舒在节目中介绍的那样,机器人正在从“表演者”走向“合作者”。这种“真控制论功夫”不仅是中国功夫文化的科技表达,也是人性的表达。这也是迈向目标的重要一步他型机器人的产业化。北京记者新闻贝壳财经魏博雅编辑徐玉婷纠正刘军
2026年央视马年春晚,御数科技携G1、H2类人形机器人第三次登上央视舞台,呈现全球首个全自主人形机器人群武术表演《Martial BOT》。从跑酷桌跳到单腿翻筋斗、棍棒格斗、剑术,这场“网络真功夫”不仅让观众着迷,也再次更新了人形机器人的技术极限。新京报贝壳财经记者从玉树科技获悉,从去年11月正式发布,到跨年夜完美呈现,玉树工程师在短短几个月内攻克了一系列全球性技术难题。最终,这款人形机器人突破了运动性能的极限,取得了多项“世界第一”。玉树H2仿人机器人玩剑。央视新闻截图 攻克“难招”:跟头、跑酷,如何操控装备?期间节目中,玉树机器人在全球首次表演了一系列高难度动作,包括一系列引人注目的旋转桌子跑酷、弹射空翻、最大高度超过3米的空翻、连续单腿翻筋斗、两步墙后空翻、巨大的七圈半旋转旋转等。玉树告诉贝壳财经记者,该程序最困难的动作集中在三类,其中包括互动对象。动作(棍术、双截棍、太师剑等)、环境互动动作(跑酷翻桌、踢墙等)、极限地面动作(如空中连续旋转)。例如,考虑环境交互动作(例如 voltea 跑酷桌或踩在墙上)。该类别的主要挑战在于准确估计机器人在高速运动过程中的相对位置并动态调整脚手架。据报道工程师很小心在模拟中考虑了可能出现的姿势偏差,训练机器人在运行过程中实时规划步态,最终实现稳定地穿越和利用桌子、墙壁等障碍物。玉树G1机器人踩墙。央视新闻截图 物体交互动作(棍术、双节棍、太师剑等)需要机器人实时检测设备状态并对干扰做出反应。玉树团队对设备进行了物理建模,并在模拟环境中进行了广泛的强化学习训练。这使得机器人能够学习动态识别和控制相关设备的扭矩。我们广泛测试了地面极端运动(例如空中连续旋转)的软件和硬件性能。通过硬件结构升级、电机性能优化、运动控制算法迭代、多传感器融合定位,玉树fi翻筋斗后终于实现厘米级落点控制。玉树G1机器人武术表演背后的“黑科技”央视新闻截图:从“集群控制”到“全自主协作”:数十个机器人如何协同作战?展会上,数十台机器人进行了复杂的队形变化、快速动作和舞台互动,甚至在激烈的动作后准确返回原来的位置。这一切的背后,离不开玉树自主研发的全新升级的高并发集群控制系统的支持。该系统首先利用机器人自己的 3D 激光雷达实时扫描和定位场景,使每个机器人能够“自我定位”。主控制台实时接收每个机器人的位置。获取信息并提供目标轨迹和行动指令。当机器人收到指令后,调用运动控制算法跟踪目标点,到达t他在指定时间内指定位置,并调用武术运动控制算法来完成一系列动作。数十台玉树机器人将共同登台表演。在央视新闻截图过程中,玉树利用AI融合定位算法,深度融合人体检测数据和3D激光雷达数据,每秒处理数百次环境信息,让机器人在剧烈运动后也能保持准确的位置,避免在翻跟头等高动态运动中丢失位置。更重要的是,系统具有自我监控和自主恢复能力。即使机器人在表演过程中因干扰而发生偏离,它也能完全自主地快速返回到原来的位置,确保整个表演的连续性和一致性。这种高并发、低延迟的集群控制能力是全球首个全自主人形机器人集群的核心三武术表演。从舞台到现实:武术背后的技术基础如何转移到产业? 《Wu BOT》不仅是视觉上的享受,更是于叔技术能力的凝结。这些技术可以转移到现实世界的场景,例如工业和服务业。以多机协调系统为例,支撑整个武术表演的集群自动控制系统,解决了数十台机器人组成复杂队形的实时编程和动作同步问题。该技术可迁移到工业场景中的多机器人协同巡检、仓库分拣、装配线等任务中,实现大规模作业的高效协同。支持的运动和外部干扰处理技术在精密装配、重物搬运、清洁服务等场景中具有广泛的应用价值。机器人的抓取设备时应对外界冲击的能力本质上体现了机器人对外界干扰的自适应控制能力。机器人在跑酷台转弯时对步态和障碍物的动态判断和协调等相对定位和环境交互能力,非常符合货架上堆放物品、穿过狭窄空间、爬楼梯等任务的要求。经过程序验证的技术方案让您即使在跑步时也能快速完成姿势调整。当转移到现实场景中时,机器人的作业效率和环境适应性显着提高。正如于舒在节目中介绍的那样,机器人正在从“表演者”走向“合作者”。这种“真控制论功夫”不仅是中国功夫文化的科技表达,也是人性的表达。这也是迈向目标的重要一步他型机器人的产业化。北京记者新闻贝壳财经魏博雅编辑徐玉婷纠正刘军